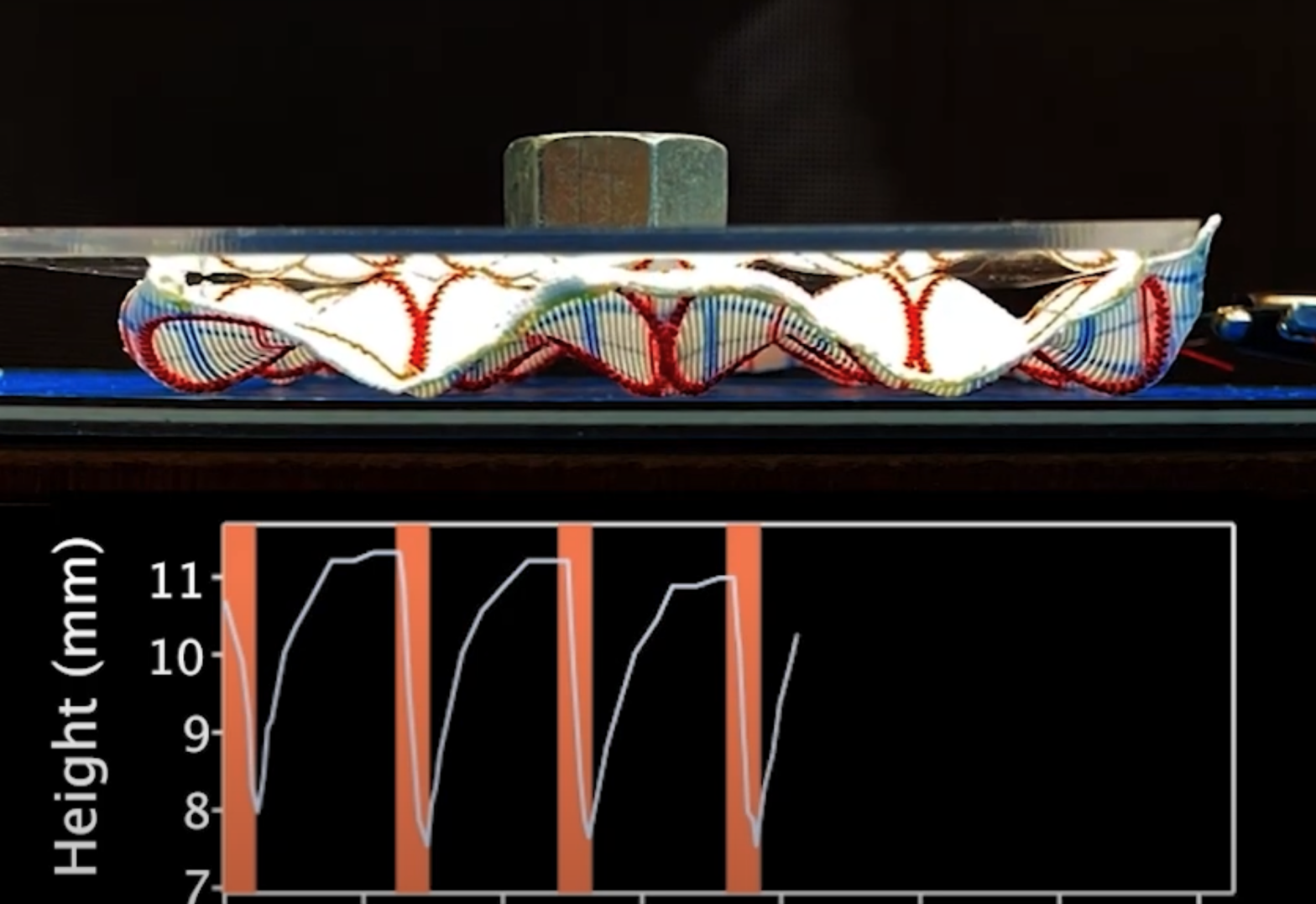
We have developed soft actuators called “Strained Elastic Membranes with Adjustable Modulus Edges” (SESAMEs). These fabric-based modules are made by stretching spandex fabric on a frame and installing shape memory wire borders using machine embroidery. When released from the frame, the SESAMEs take on a saddle shape that lets the wire bend a little and the fabric shrink a little. But when the shape memory wire is heated, it stiffens, increasing the cost of bending relative to fabric stretching and causing the saddle to flatten. The result is an actuator that cycles between 3D and flat shapes in soft robotics applications.
Paper:
1525082
{:FU2LYFCS}
1
chicago-author-date
50
default
1
1
1869
https://harnettlab.org/wp-content/plugins/zotpress/