Three papers that inspired our group in 2016 are connected by the theme of fluid-driven robotics. Whether the fluid is a gas or a liquid, these robotic systems need a way to (1) move the fluid around, and (2) get feedback on how much it moved, because the amount of motion depends on what the robot is touching. These are very soft squishy robots.
First off is Huichan Zhao and team’s work on optical sensing in an air-driven robotic hands in the Shepherd group at Cornell, where I spent part of my sabbatical. They were finishing it up when I was there, so it was exciting to see the outcome in the very first issue of the new journal Science Robotics this December:
In this paper, the driving force comes from an air tank, and the main innovation is sensing pressure, strain and bending with an optical signal instead of an electrical one. The most practical advantage is the ability to get the signal without having to make a soft-to-hard electrical connection, which is a weak point in soft structures that go through extreme distortions. That’s where it’s going to break most times. Unlike an electric current from a resistive sensor, light can jump across an air gap. Working toward human-level touch sensing, they demonstrated the ability to sort a ripe from an unripe tomato by touch!
But what about the actuators themselves? We need new ways to shuttle fluid around in soft systems so they’re not tethered to a gas bottle. If a computer or microcontroller is going to be the brain, it’s convenient if the pump runs off an electronic driving signal (though the most biomimetic thing would be fully squishy chemical systems). The holy grail is a small, high pressure, high flow rate, efficient, low-voltage pump that can get stepped on and still work. And it would be great if nothing bad happens when the pump fluid gets in your eye.
Electroosmotic flow at conductive surfaces is our approach to portable pumping. There are hundreds of kinds of pumps, and many different species even within the electroosmotic category. Two different ideas came out of other groups in 2016.
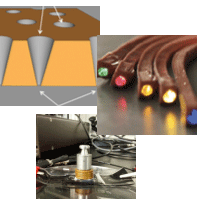
The Martin group uses a water-based electrolyte with conical nanopores to do electroosmotically driven pumping. The surfaces are insulating, unlike our recent work, and because of the tiny dimensions at the 22 nm diameter tip, the ion concentration at the tip depends on polarity. This means they can get single-direction flow even with an AC signal. The great benefit of an AC signal is it eliminates gas bubbles from electrolysis that would stop the pump by cutting off the electric current.
Flow goes in the direction you would think, big to small end like a funnel, although intuition is a bad guide at these dimensions. The flow rates were kind of small: 4 microliters/minute per square cm of membrane. However, this was with a sub-5 volt signal that produced an astounding 200,000 Pa of pressure thanks to the high flow resistance of the tiny pores. This is the typical pressure in a car tire (Pascals are small) but in the world of soft robotics, it’s very impressive.
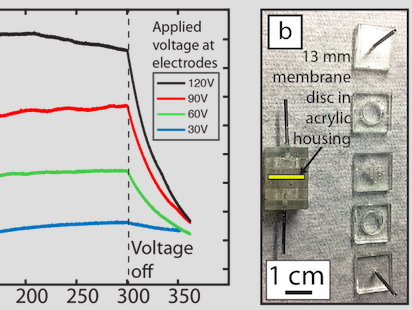
The Smela group escapes the electrolysis bubble problem with chemistry. In an earlier paper, they pioneered the approach of using propylene carbonate as the working fluid instead of water-based solutions. It has the amazing advantage of producing electroosmotic flow at up to a kilovolt DC, without generating electrolysis bubbles. And it isn’t terrible if it gets on your skin (though we haven’t tried it.) They used a cellulose membrane with ~8 micron diameter pores for their electroosmotic pumping surface. With 500-600V DC, they achieved actuation of small silicone domes with forces of 45 g, similar to lightweight switches on a TV remote control. 600V may sound like a lot of voltage, but people in the soft robotics actuator world are regularly using thin dielectric elastomer actuators at 1000 to 3000 V. The pumping rates look very fast, in the range of~ 1 ml per minute per square cm of membrane, at a respectable pressure of 15000 Pa.
This paper earned a spot high on my list thanks to the innovation, but also the amount of detail on packaging and testing the actuators. The small image here shows an actuator lifting a weight!